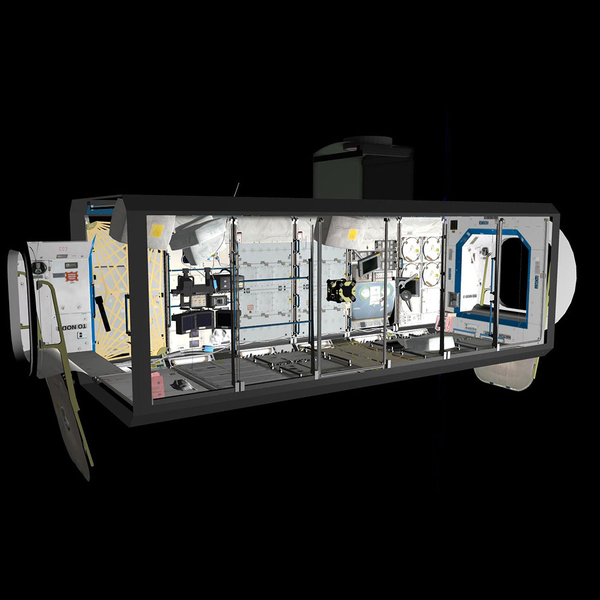
NASA Astronet
A Human-Centric Network of Co-Robots

Swarm Mapping and Control
Autonomous Aerial and Ground Robot Swarm
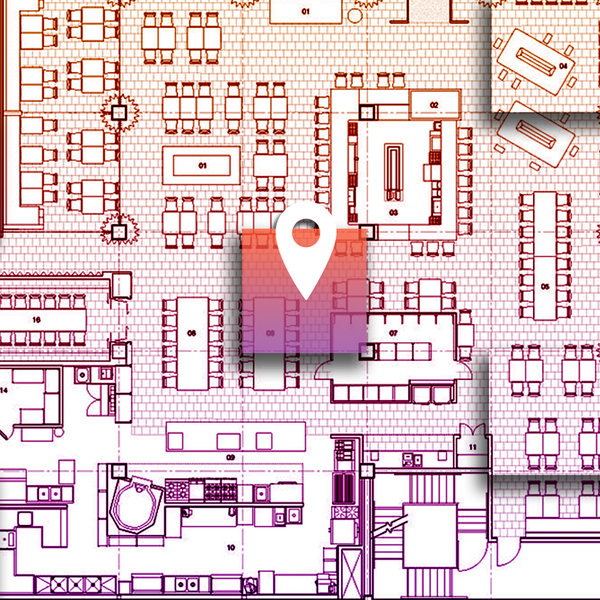
Visual-Radio-Inertial Localization
WiFi based Indoor Positioning System



AR Based Task Tracking Drone
Unsupervised Learning based on GMM
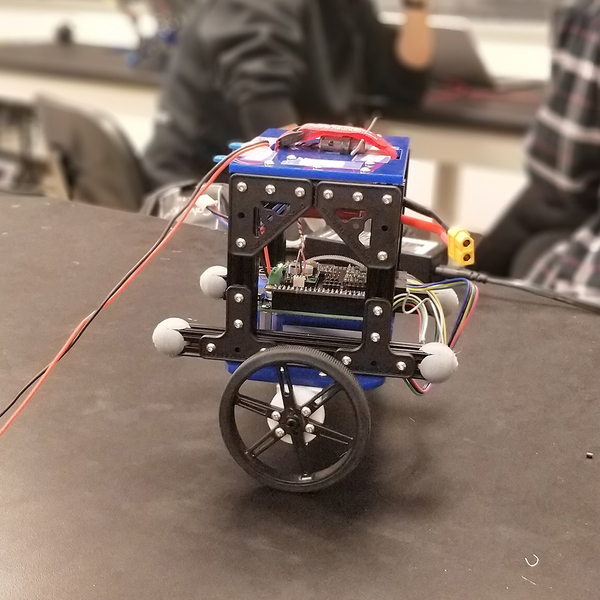
Autonomous Balance Bot
Self Balancing Two-Wheeled Bot

PoseNet++
Deep Learning for SLAM


3D Bounding Box Regression
Geometric Deep Learning


Pedestrian Tracking
Mask R-CNN based Pedestrian Tracking


AUVSI RobotX
Autonomous Maritime Systems

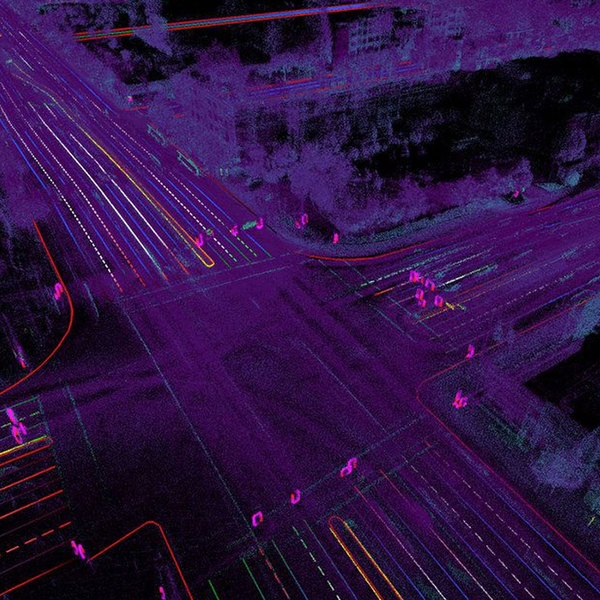
Simultaneous Localization & Mapping
Particle Filter based SLAM

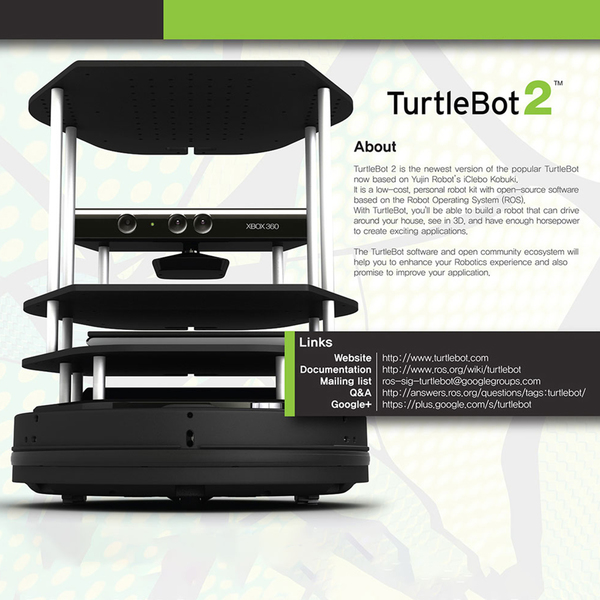
Path Planning | Exploration
Multi-Agent Exploration using TurtleBots
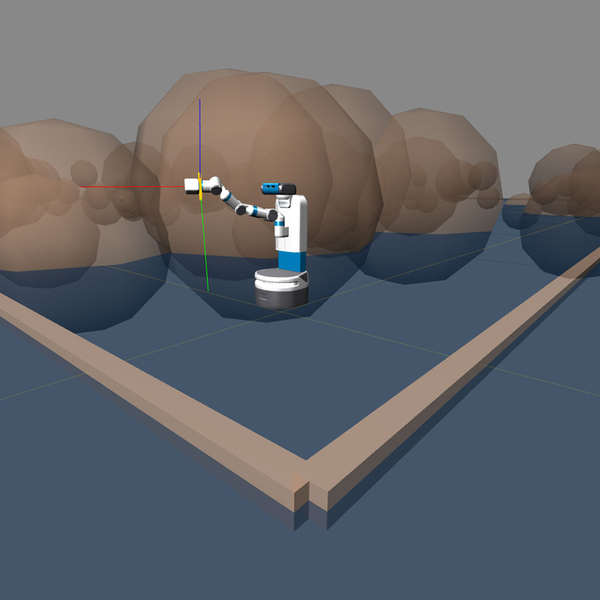
Robot Kinematics Simulator
Javascript based Kinematic Simulator


Formula SAE 🇮🇹
Vehicle Dynamics for Sports Cars
Game Physics Simulations
Single, Double and Cart Pole Pendulums

Sense
App Streaming Sensor Data via WebSockets

Vision Based Autonomous Arm
Microsoft Kinect + Robot Arm


Gesture Controlled Robotic Arm
Arduino and XBee Based Robot Arm


Portable WhiteBoard Cleaner
Arduino-Powered Manipulator

I also run a blog where I share interesting things I learn at work, offer tips for beginners, and write about tech / trading topics that others might find helpful. If you love what you see, definitely check out my entire archive on Medium !
Loading posts…
Hey! 👋
I’m Sahib Dhanjal, a robotics engineer obsessed with building machines that can think, move, and navigate the world on their own. I spend my days (and many late nights) tinkering with hardware, experimenting with algorithms, and pushing robots to better understand and interact with their surroundings.
Outside work, you’ll find me playing soccer, ultimate frisbee, or volleyball — maybe even running 🏃, hiking 🏔️, and biking 🚴🏻.
Always